2012年3月に修士課程を終了した宇佐美洋佑がバイオメカニズム学会で奨励賞を受賞しました。誘発筋音図のシステム同定に関する研究に対してです。参考論文は,
宇佐美,宮原,内山:「誘発筋音図のシステム同定と伝達関数の刺激頻度依存性の解析」,バイオメカニズム,Vol. 21,pp. 195-205 (2012)
です。
第34回バイオメカニズム学会学術講演会で懇親会に先立って表彰されました。写真は懇親会会場で撮影したものです。

2012年3月に修士課程を終了した宇佐美洋佑がバイオメカニズム学会で奨励賞を受賞しました。誘発筋音図のシステム同定に関する研究に対してです。参考論文は,
宇佐美,宮原,内山:「誘発筋音図のシステム同定と伝達関数の刺激頻度依存性の解析」,バイオメカニズム,Vol. 21,pp. 195-205 (2012)
です。
第34回バイオメカニズム学会学術講演会で懇親会に先立って表彰されました。写真は懇親会会場で撮影したものです。
T. Uchiyama and H. Sakai, “System identification of evoked mechanomyogram from abductor pollicis brevis muscle in isometric contraction,” Med. Biol. Eng. Comput., 51 (12), pp. 1349–1355 (2013)が出版されました。
日吉キャンパスで開催されている計測自動制御学会ライフエンジニアリング部門シンポジウムで,Mechanism of Mechanomyogram and Its Modelのタイトルで発表しました。酒井の修論と田村の修論を合わせた内容です。
写真は日吉キャンパスの入り口の立て看板です。高さが4 mあります。大判プリンタがあれば印刷は簡単ですが,これほどの長尺になると裁断が大変です。
T. Uchiyama, H. Sakai, System identification of evoked mechanomyogram from abductor pollicis brevis muscle in isometric contraction, Medical & Biological Engineering & Computing, DOI 10.1007/s11517-013-1107-9 電子版が出版されました.
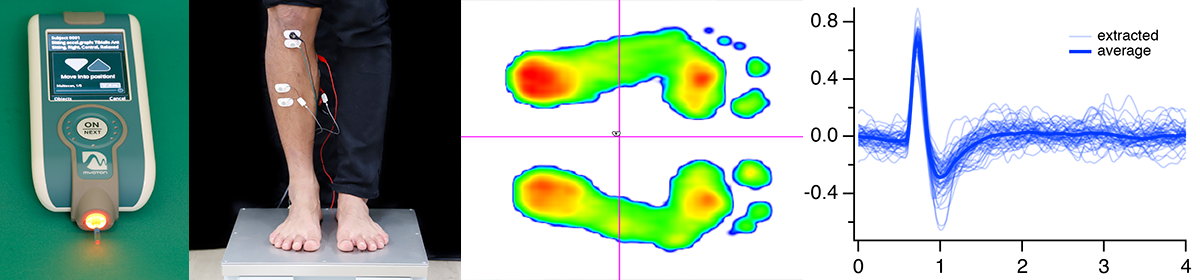
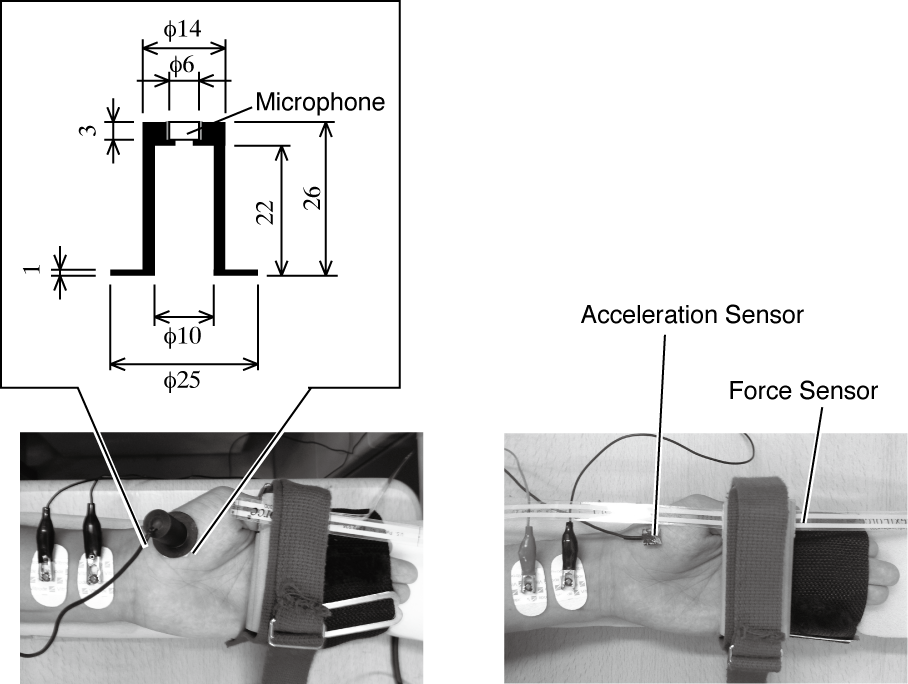
筋音の計測には,様々な振動センサが用いられます.よく用いられるものは加速度センサとレーザー変位計であろうと思います.それそれ加速度と変位を計測します.他には,コンデンサマイクロフォンやピエゾ振動センサが用いられることがあります.コンデンサマイクロフォンでは変位が計測されることが知られています.
振動を計測するセンサは,それぞれの仕様,つまり計測可能とされる周波数の範囲で理想的にはフラットな周波数特性を有します(帯域は–3 dBで示されることが多いはずです).加速度センサでは加速度の周波数がセンサの帯域内であればフラットな特性を,変位センサでは変位の周波数がセンサの帯域内であればフラットな特性になります.ある振動の変位が





^2\sin 10 \pi t")
^2\sin 100 \pi t")
一般的に,低い周波数の振動の計測には変位センサが,高い周波数の振動の計測には加速度センサが適していると言われています.筋音の周波数は100 Hz以下ですが,数Hzの成分は筋の収縮特性における粘弾性の情報を含んでおり,一方で数十Hzの成分は皮下組織を粘弾性体とみなすときの固有周波数に対応する周波数です.わずか1桁の周波数の違いではありますが,計測対象と計測条件によって加速度と変位のどちらを計測するかを熟慮する必要があります.
音響用のコンデンサマイクロフォンの周波数帯域は,筋音の周波数より高くなります.人間の可聴域は20〜20,000 Hzで,マイクロフォンの帯域の下限はしばしば数十Hzです.筋音の計測には,帯域の下限が低い,特別なマイクロフォンが必要です.また,コンデンサマイクロフォンでは原理上,マイクロフォンに印可する直流電圧とマイクロフォンの出力を分離するためにハイパスフィルタが必要です.本研究室のように,筋音のシステム同定を行う場合には,フィルタの伝達関数の影響を考慮する必要があります.
酒井の修論をまとめた論文,System identification of evoked mechanomyogram from abductor pollicis brevis muscle in isometric contractionがMedical & Biological Engineering & Computingにacceptされました.
短母指外転筋の筋音を加速度センサで計測すると,その信号は4次のモデルで近似でき,コンデンサマイクロフォンで計測するとその信号は3次のモデルで近似できます.しかも,それらの固有周波数は異なります.一方,外転トルクを計測すると2次のモデルで近似できます.我々は前脛骨筋の筋音を加速度センサで計測した信号は6次のモデルで,レーザー変位計で計測した信号は2次のモデルで近似できることを報告しています(T. Uchiyama and K. Shinohara, 2013).前脛骨筋の筋音のモデルとの違いを筋の形状の違い(平行筋と羽状筋)に基づいて解釈し,また筋音のモデルについて述べた論文です.
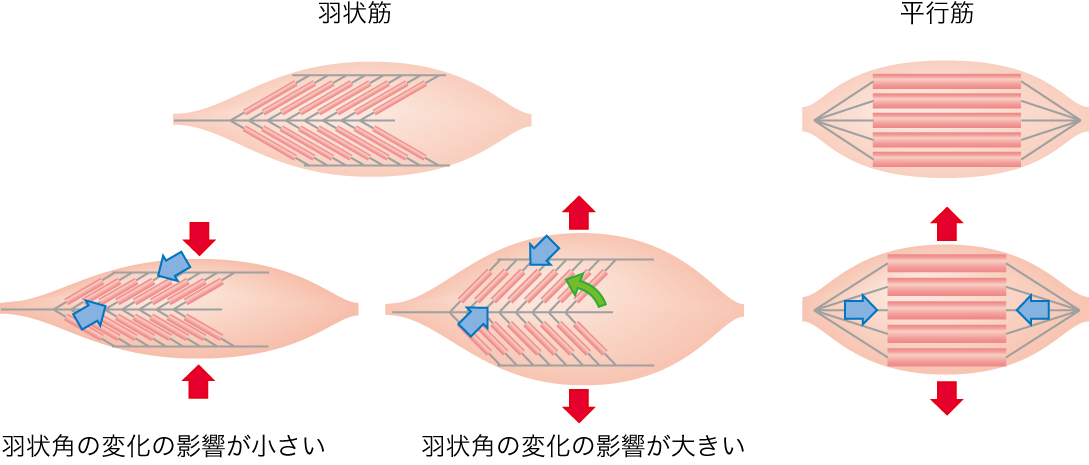 羽状筋では筋線維の収縮が直接皮膚表面の振動として計測されることに対して,平行筋では(体積を一定とすれば)筋線維の側方への拡大による振動が計測されることになります.この違いが,筋線維の収縮に関連する情報が筋音に強く現れるか否かの違いになると考えています.
羽状筋では筋線維の収縮が直接皮膚表面の振動として計測されることに対して,平行筋では(体積を一定とすれば)筋線維の側方への拡大による振動が計測されることになります.この違いが,筋線維の収縮に関連する情報が筋音に強く現れるか否かの違いになると考えています.
有岡の論文の別刷が届きました.
有岡の論文「機械刺激による筋・皮下組織・皮膚の力学特性の解析」が生体医工学Vol. 50, No. 6, pp 613-619 (2012)に掲載されました.
我々の研究室では,電気刺激にパルス幅0.5 msの単極性矩形波を用いています.これの周波数帯域は次のように計算できます.
パルス幅が

")
")
になります.
形式的に
になります.つまりsinc関数の絶対値です.
この関数は
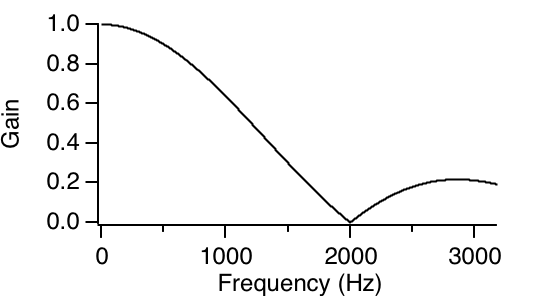
になります.-3 dBの帯域で886 Hz位になります.
筋音の周波数帯域は,加速度では100 Hz以下(変位ではさらに低い)ですから,0.5 msの単極性矩形波は十分フラットな周波数特性を有しています(100 Hzのゲインは0.996).
工学的な説明は上記のとおりですが,電気生理学的には活動電位を1つ発生させればよく,活動電位の持続時間は数ミリ秒ですから,上記より帯域は狭くなるでしょうが,機械的性質を計測する上では問題にはならないと考えられます.活動電位で筋のモデルの力発生要素(")
有岡が執筆した論文の生体医工学への掲載が決定しました.
有岡,内山:「機械刺激による筋・皮下組織・皮膚の力学特性の解析」,生体医工学,Vol. 50, No. 6, 印刷中
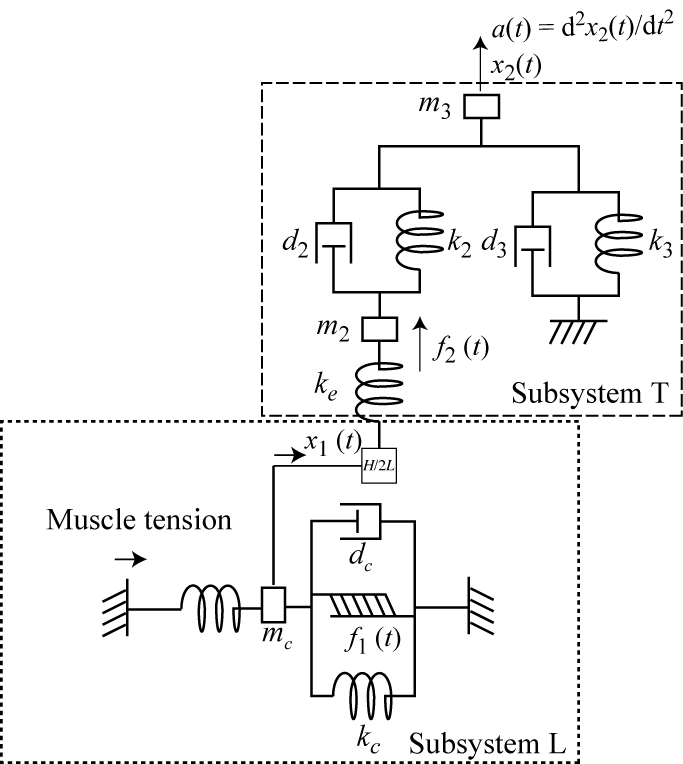
当研究室では,電気刺激を入力すると筋音図を出力するシステムを同定し,その力学モデルを提案してきました.このモデルは,バネ・マス・ダッシュポットで構成される2次系を3つ接続したものです.それぞれ,筋の収縮方向の特性,筋および皮下組織(皮膚)の筋の収縮方向に直交する方向の特性であると考えていますが,3つの伝達関数がそれぞれどれに対応するものであるかは未解決でした.そこで,機械振動を外部から与えて,機械インピーダンスおよび振動伝達率から固有周波数を推定し,筋と皮下組織の伝達関数の分離を試みました.

")
|=|\frac{\sin^2(T\omega/2)}{T\omega/2}|")