大学院の学位授与式でした.5名が修士(工学)の学位を授与されました
大学院の学位授与式でした.5名が修士(工学)の学位を授与されました

学科分け説明会では,研究室見学ツアーを担当しました.筋電や筋音を計測して,筋肉の弾性の調節機構を研究していることを説明した後,筋電の計測実験を行いました.

7:30から決勝戦でした.勝ちました.初めて優勝しました.

M. Murayama, T. Inami, N. Shima, K. Nosaka, T. Uchiyama and Tsugutake Yoneda, “Optimum displacement of muscle in relation to thickness for biceps brachii hardness measurement using a push-in meter,” Biomed. Phys. Eng. Express 5 (2018) 017001
https://doi.org/10.1088/2057-1976/aaea52
が出版されました.体育研究所との共同研究です.
河口湖・西湖に行きました.写真は富士山アドベンチャーツアーに参加したところです.


Yuta Sakurai & Yutaka Hori: “Bounding Transient Moments of Stochastic Chemical Reactions”
が公開されました.
DOI: 10.1109/LCSYS.2018.2869639
Y. Sakurai, Y. Hori: Bounding Transient Moments of Stochastic Chemical Reactions
がIEEE Control Systems Lettersにacceptされました.
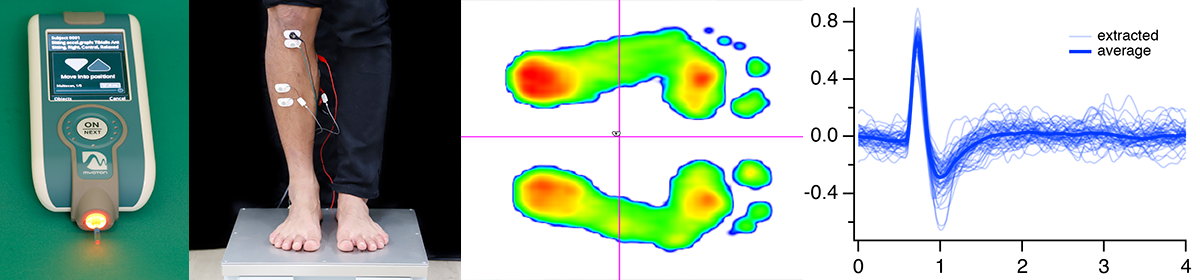
塾内高校の研究室体験「立っているときの揺らぎを計る」を実施しました.
床反力計で応力中心の揺らぎを計測しました.このとき,ふくらはぎの筋肉に電気刺激を加えると,電気刺激による筋肉の収縮によってバランスが崩れて応力中心が揺らぎます.この揺らぎから,ふくらはぎの筋肉と足関節まわりのバネ定数を推定しました.
 応力中心の揺らぎを従来の方法で解析している様子
応力中心の揺らぎを従来の方法で解析している様子
 電気刺激を加える実験の説明
電気刺激を加える実験の説明
 電気刺激を加える実験を行なっているところ
電気刺激を加える実験を行なっているところ
40th International Conference of the IEEE Engineering in Medicine and Biology Societyで7月18日に
D. Fukumori, T. Uchiyama, “Stiffness estimation of the medial gastrocnemius muscle in toe walking”
を発表しました