カテゴリー: 研究成果
Advanced Biomedical Engineering
府川が執筆した論文
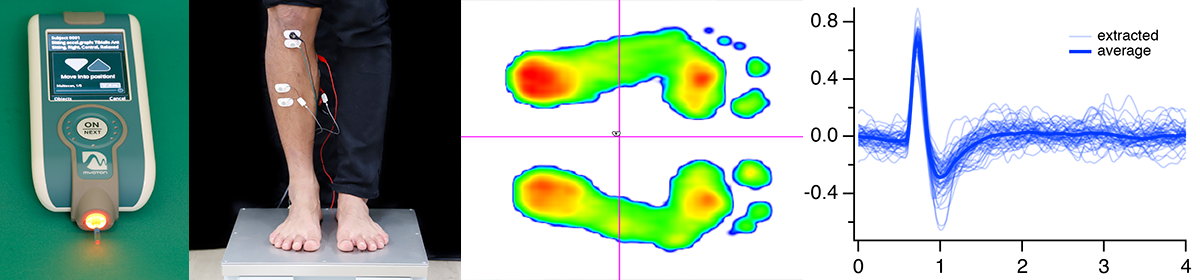
T. Fukawa, T. Uchiyama, “System identification of evoked mechanomyogram to clarify lower limb muscle stiffness in treadmill walking”
のAdvanced Biomedical Engineeringへの採録が決定しました.
トレッドミルを歩行するときの,踵接地,つま先離地および遊脚期の前脛骨筋の誘発筋音を計測し,システム同定を行って固有周波数(弾性の平方根に比例する)の変化を求めた論文です.
JEKの論文
巻・号・ページが確定しました.また2016年1月8日までダウンロード可です.
T. Uchiyama, K. Saito, K. Shinjo, ‘Muscle stiffness estimation using a system identification technique applied to evoked mechanomyogram during cycling exercise’, Vol. 25, No. 6, pp. 847–852, (2015).
JEKオンライン版
新庄の修論をまとめた論文がJournal of Electromyography and Kinesiologyのオンライン版に掲載されました.
Journal of Electromyography and Kinesiology
新庄の修論をまとめた論文
T. Uchiyama, K. Saito, K. Shinjo, Muscle Stiffness Estimation using a System Identification Technique Applied to Evoked Mechanomyogram during Cycling Exercise
がJournal of Electromyography and Kinesiologyにacceptされました.
自転車エルゴメータをこいでいるときの外側広筋の弾性を,システム同定法を用いて推定した論文です.
生体医工学シンポジウム2015
生体医工学シンポジウム2015(岡山国際交流センター)にて、府川が
System identification of evoked mechanomyogram in treadmill walking
を発表しました。
計測自動制御学会論文集別刷
府川の論文の別刷が届きました.
生体医工学別刷
品田の論文の別刷が届きました.
World Congress on Medical Physics and Biomedical Engineering 2015
カナダ・トロントで開催されたWorld Congress on Medical Physics and Biomedical Engineering 2015で,
T. Uchiyama, S. Otsuka, ‘Estimation of drosiflexion torque using a Kalman filter’
を発表しました.
 会場のMetoro Tronto Convention Centre
会場のMetoro Tronto Convention Centre
第54回日本生体医工学会大会
第54回日本生体医工学会大会で2件の発表を行いました.
- 永岡,村山,内山:超音波画像装置を用いた筋硬度計測系の構築
- 府川,内山:トレッドミル歩行中における前脛骨筋の誘発筋音図のシステム同定