日吉キャンパスの銀杏が色付いてきました。例年より少し早いようです。

日吉キャンパスの銀杏が色付いてきました。例年より少し早いようです。
2012年3月に修士課程を終了した宇佐美洋佑がバイオメカニズム学会で奨励賞を受賞しました。誘発筋音図のシステム同定に関する研究に対してです。参考論文は,
宇佐美,宮原,内山:「誘発筋音図のシステム同定と伝達関数の刺激頻度依存性の解析」,バイオメカニズム,Vol. 21,pp. 195-205 (2012)
です。
第34回バイオメカニズム学会学術講演会で懇親会に先立って表彰されました。写真は懇親会会場で撮影したものです。

T. Uchiyama and H. Sakai, “System identification of evoked mechanomyogram from abductor pollicis brevis muscle in isometric contraction,” Med. Biol. Eng. Comput., 51 (12), pp. 1349–1355 (2013)が出版されました。
木星は23:00前に上りはじめます。写真は80 mmの屈折式望遠鏡に焦点距離9 mmの接眼レンズを付けて,リレーレンズ方式で6Dで動画を撮影しました。動画ファイルをAVI形式に変換してRegiStax 6で120枚あまりを合成しました。

10月5日,6日は研究室合宿で箱根でした。写真は大涌谷です。

矢上キャンパスからみて川崎方面に虹がかかりました。

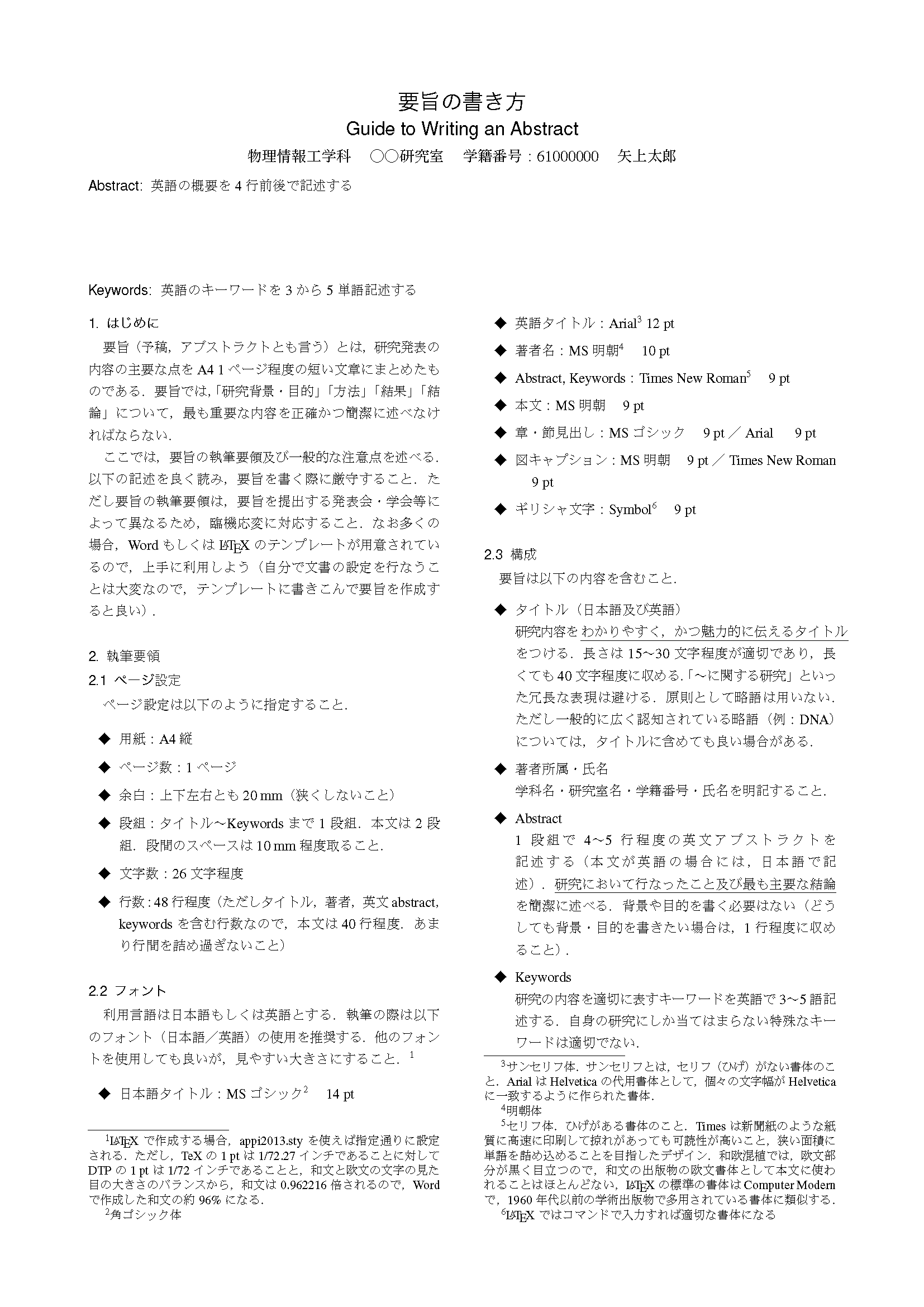
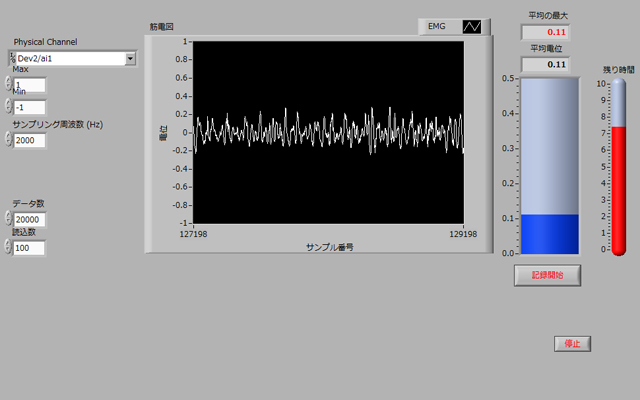
今日は湘南藤沢高等部の理工学部見学会でした。当研究室は見学コースの一つでした。見学会のときには,筋電図と筋音図の説明の後,計測のデモンストレーションを行います。筋電図の計測では,見学グループ毎に代表者1名に最大努力時の値を記録します。筋電図は絶対値を求めて一定時間の平均値を求めたものを指標にします。前のグループより大きな値がでると盛り上がります。
筋電図の波形をプロジェクタでスクリーンに投影すると同時に,アンプを通してスピーカから音としても確認できるようにしています。筋電図の周波数は表面電極で計測すると10〜1000 Hz程度なので,音としては低いですが,視覚と聴覚の両方で体験できるので,デモンストレーション向きです。一方,筋音図は「音」とは名ばかりで100 Hz以下の振動なので音として体験するには低くてデモンストレーションには向きません。
某学会では,第1人称の「I」と「We」を使わないとしているようです。使用する頻度が高くないことは事実でしょうが,第1人称代名詞の使用の可否についての意見は一律ではないそうです[1]。
■回避すべき使用方法[1]
■適切な使用方法[1]
[1] Kate L. Turabian著, 沼口隆,沼口好雄 訳,シカゴ・スタイル 研究論文執筆マニュアル,慶應義塾大学出版会(2012),pp. 166–168
8月のオープンキャンパスから新しい学科のパンフレットを配布しはじめました。下のパンフレットの写真は学科のweb pageに掲載したものです(こういう写真も私が撮影します)。

パンフレットの表紙がなかなか決まらず,私が作成した案をいくつか業者に提示しました。
この案は,卒業式のときの集合写真を使ったもので,格調高い感じがします。パンフレットにすると顔がはっきりわかるので,今回は見送りました。
2つめは学科のロゴとその鏡像を大きく使ったものです。
3つめは,4つの研究分野と2つの教育分野の文字をつかったものです。
実際のパンフレットは2つめと3つめを融合させたデザインになりました。
業者に提示することをしなかった案も10枚以上作りました。アイデアを形にしてみたものの,私の中で全く納得できないものでした。
卒業研究発表会などの要旨の様式を作って使っていました。今回,4年生の必修科目のプレゼンテーション技法の発表会用に,要旨のLaTeXのスタイルファイルが欲しいとのことで,当研究室で使っていたものをベースに,先にリリースされたWordの様式に近くなるように修正したものを提供しました。
\oddsidemargin -5.4mm \evensidemargin -5.4mm \textwidth 170mm \topmargin -5.4mm \headheight 0pt \headsep 0pt \textheight 257mm
\columnsep 10mm
\renewcommand{\normalsize}{%
\@setfontsize\normalsize\@ixpt{14.2}}
\renewcommand{\large}{%
\@setfontsize\large\@xpt{15}}
\renewcommand{\Large}{%
\@setfontsize\Large\@xiipt{14}}
\renewcommand{\LARGE}{%
\@setfontsize\LARGE\@xivpt{18}}
\renewcommand{\section}{\@startsection{section}{1}{\z@}%
{1\Cvs \@plus.1\Cdp \@minus.1\Cdp}%
{.1\Cvs \@plus.1\Cdp}%
{\reset@font\normalsize\sffamily\gtfamily}}
\renewcommand{\subsection}{\@startsection{subsection}{2}{\z@}%
{1\Cvs \@plus.1\Cdp \@minus.1\Cdp}%
{.1\Cvs \@plus.1\Cdp}%
{\reset@font\normalsize\sffamily\gtfamily}}
\renewcommand{\subsubsection}{\@startsection{subsubsection}{3}{\z@}%
{1\Cvs \@plus.1\Cdp \@minus.1\Cdp}%
{.1\Cvs \@plus.1\Cdp}%
{\reset@font\normalsize\sffamily\gtfamily}}
\def\@seccntformat#1{\csname the#1\endcsname\hskip .5zw}
\setlength\intextsep{0pt}
\setlength\textfloatsep{0pt}
\setlength\belowcaptionskip{5\p@}
\setlength\abovecaptionskip{0\p@}
\renewenvironment{thebibliography}[1]
{\section*{\refname\@mkboth{\refname}{\refname}}%
\list{\@biblabel{\@arabic\c@enumiv}}%
{\settowidth\labelwidth{\@biblabel{#1}}%
\leftmargin\labelwidth
\advance\leftmargin\labelsep
\setlength\itemsep{0.0zh}%
\setlength\baselineskip{12pt}%
\@openbib@code
\usecounter{enumiv}%
\let\p@enumiv\@empty
\renewcommand\theenumiv{\@arabic\c@enumiv}}%
\sloppy
\clubpenalty4000
\@clubpenalty\clubpenalty
\widowpenalty4000%
\sfcode`\.\@m}
{\def\@noitemerr
{\@latex@warning{Empty `thebibliography' environment}}%
\endlist}
他にも細かな見た目の修正がいくつかありますが,レイアウトに関してはこの位の修正でほぼWordのテンプレートに近くなります。
箇条書きの環境について,行間を詰めることは環境を定義すればできるのですが,ここでは再定義しないで,本文の箇条書きの環境の中に
\setlength\parsep{0pt}\setlength\itemsep{0pt}
を記述することにしました。
左は欧文がTeXのデフォルトの書体であるComputer Modernで組んだもの,右は\usepackage{times}でセリフ体をTimes Roman,サンセリフ体をHelveticaで組んだもの(実際には互換書体)。