当研究室では,ヒトの運動を対象として,これまで計測することが難しかった物理量を推定する方法を研究しています.具体的には,生体の微小な信号を計測し,それを処理すること,またヒトに対する入力と出力を考えてそのシステムを同定することです.対象としては,次に述べる重心の動揺,筋が収縮するときの振動である筋音,筋が発生する力などです.
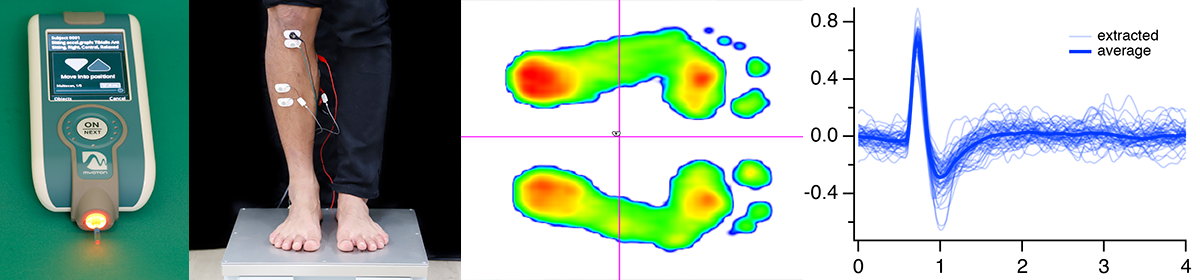
例えば,ヒトが立位姿勢を維持しているときには,フクラハギとスネの筋肉を収縮させています.そのため,重心の位置は常に揺らいでいます.立位姿勢を維持しているときに,筋肉に電気刺激を加えると,電気刺激による揺らぎが本来の揺らぎに重畳します.電気刺激による揺らぎを抽出してモデル化すると,立位姿勢を維持している時の筋肉のバネの性質を知ることができます.
筋肉のバネの性質は,ヒトが機械とは違ってなめらかでやわらかい運動を実現することに役立っているだけではなく,運動エネルギーを弾性エネルギーとして蓄えて,再び運動のエネルギーとして利用して,むだにエネルギーを消費しないことにも役立っています.筋肉のバネの性質をヒトは上手く調節しているはずです.この調節の仕組みを明らかにすることを目指しています.
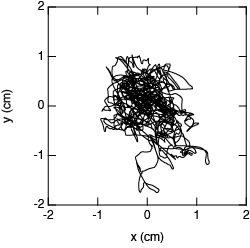
y軸が前後方向(+が前)
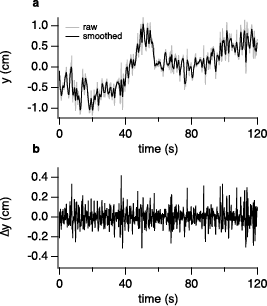
上:電気刺激を加えたときの揺らぎ(灰色)とそれをカルマンフィルタで平滑化した揺らぎ(黒)
下:電気刺激による揺らぎを抽出したもの
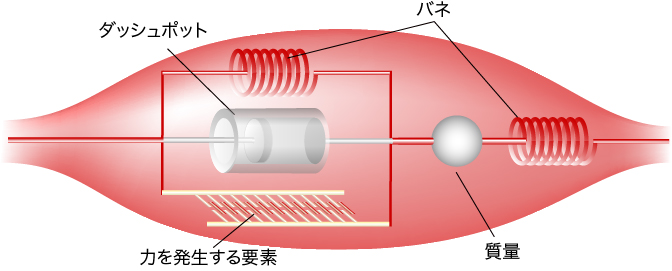
バネ・マス・ダンパーのモデルで表すと,電気刺激による揺らぎから,筋肉のバネの性質を知ることができる