物理情報数学Bで,行列の累乗の応用例として,餌と捕食者の関係を表す行列差分方程式を説明しています.
「第
")
")
")
")
")
")
上記の関係を行列差分方程式で表すと
![\left[\begin{array}{c}x_1(k+1) \\x_2(k+2)\end{array}\right] = \left[\begin{array}{rr}\alpha & -\beta \\ \delta & \gamma\end{array}\right] \left[\begin{array}{c}x_1(k) \\x_2(k)\end{array}\right]](https://s0.wp.com/latex.php?latex=+++%5Cleft%5B%5Cbegin%7Barray%7D%7Bc%7Dx_1%28k%2B1%29+%5C%5Cx_2%28k%2B2%29%5Cend%7Barray%7D%5Cright%5D+++%3D+++%5Cleft%5B%5Cbegin%7Barray%7D%7Brr%7D%5Calpha+%26+-%5Cbeta+%5C%5C+%5Cdelta+%26+%5Cgamma%5Cend%7Barray%7D%5Cright%5D+++%5Cleft%5B%5Cbegin%7Barray%7D%7Bc%7Dx_1%28k%29+%5C%5Cx_2%28k%29%5Cend%7Barray%7D%5Cright%5D+++&bg=ffffff&fg=000000&s=0 "\left[\begin{array}{c}x_1(k+1) \\x_2(k+2)\end{array}\right] = \left[\begin{array}{rr}\alpha & -\beta \\ \delta & \gamma\end{array}\right] \left[\begin{array}{c}x_1(k) \\x_2(k)\end{array}\right]")
になります.一般解は
![\boldsymbol{x}(k) = \left[\begin{array}{rr}\alpha & -\beta \\ \delta & \gamma\end{array}\right]^k\boldsymbol{x}(0)](https://s0.wp.com/latex.php?latex=%5Cboldsymbol%7Bx%7D%28k%29+%3D+%5Cleft%5B%5Cbegin%7Barray%7D%7Brr%7D%5Calpha+%26+-%5Cbeta+%5C%5C+%5Cdelta+%26+%5Cgamma%5Cend%7Barray%7D%5Cright%5D%5Ek%5Cboldsymbol%7Bx%7D%280%29&bg=ffffff&fg=000000&s=0 "\boldsymbol{x}(k) = \left[\begin{array}{rr}\alpha & -\beta \\ \delta & \gamma\end{array}\right]^k\boldsymbol{x}(0)")
になります.
この行列差分方程式を講義では手計算で解けるように,



餌と捕食者の関係のモデルとしては,ロトカ・ボルテラのモデルが知られています.このモデルでは,
}{dt} = \alpha x_1(t) - \beta x_1(t)x_2(t) \\ \displaystyle\frac{dx_2(t)}{dt} = \delta x_1(t)x_2(t) - \gamma x_2(t)")
で表されます.非線形微分方程式ですから,")
")
また,平衡点は/dt=0")
/dt=0")


x_2(t)")
")
![\displaystyle\frac{d}{dt}\left[\begin{array}{c}x_1(t) \\x_2(t)\end{array}\right] = \left[\begin{array}{rr}\alpha & 0 \\ 0 & -\gamma\end{array}\right] \left[\begin{array}{c}x_1(t) \\x_2(t)\end{array}\right]](https://s0.wp.com/latex.php?latex=+++%5Cdisplaystyle%5Cfrac%7Bd%7D%7Bdt%7D%5Cleft%5B%5Cbegin%7Barray%7D%7Bc%7Dx_1%28t%29+%5C%5Cx_2%28t%29%5Cend%7Barray%7D%5Cright%5D+++%3D+++%5Cleft%5B%5Cbegin%7Barray%7D%7Brr%7D%5Calpha+%26+0+%5C%5C+++0+%26+-%5Cgamma%5Cend%7Barray%7D%5Cright%5D+++%5Cleft%5B%5Cbegin%7Barray%7D%7Bc%7Dx_1%28t%29+%5C%5Cx_2%28t%29%5Cend%7Barray%7D%5Cright%5D+++&bg=ffffff&fg=000000&s=0 "\displaystyle\frac{d}{dt}\left[\begin{array}{c}x_1(t) \\x_2(t)\end{array}\right] = \left[\begin{array}{rr}\alpha & 0 \\ 0 & -\gamma\end{array}\right] \left[\begin{array}{c}x_1(t) \\x_2(t)\end{array}\right]")
となり,行列の固有値は実数で1つは正でもう1つは負です.したがって,
また,もう1つの平衡点")


![\displaystyle\frac{d}{dt}\left[\begin{array}{c}x_1(t) \\x_2(t)\end{array}\right] = \left[\begin{array}{rr}0 & -\frac{\beta\gamma}{\delta} \\ \frac{\alpha\delta}{\beta} & 0\end{array}\right] \left[\begin{array}{c}x_1(t) \\x_2(t)\end{array}\right]](https://s0.wp.com/latex.php?latex=+++%5Cdisplaystyle%5Cfrac%7Bd%7D%7Bdt%7D%5Cleft%5B%5Cbegin%7Barray%7D%7Bc%7Dx_1%28t%29+%5C%5Cx_2%28t%29%5Cend%7Barray%7D%5Cright%5D+++%3D+++%5Cleft%5B%5Cbegin%7Barray%7D%7Brr%7D0+%26+-%5Cfrac%7B%5Cbeta%5Cgamma%7D%7B%5Cdelta%7D+%5C%5C+++%5Cfrac%7B%5Calpha%5Cdelta%7D%7B%5Cbeta%7D+%26+0%5Cend%7Barray%7D%5Cright%5D+++%5Cleft%5B%5Cbegin%7Barray%7D%7Bc%7Dx_1%28t%29+%5C%5Cx_2%28t%29%5Cend%7Barray%7D%5Cright%5D+++&bg=ffffff&fg=000000&s=0 "\displaystyle\frac{d}{dt}\left[\begin{array}{c}x_1(t) \\x_2(t)\end{array}\right] = \left[\begin{array}{rr}0 & -\frac{\beta\gamma}{\delta} \\ \frac{\alpha\delta}{\beta} & 0\end{array}\right] \left[\begin{array}{c}x_1(t) \\x_2(t)\end{array}\right]")
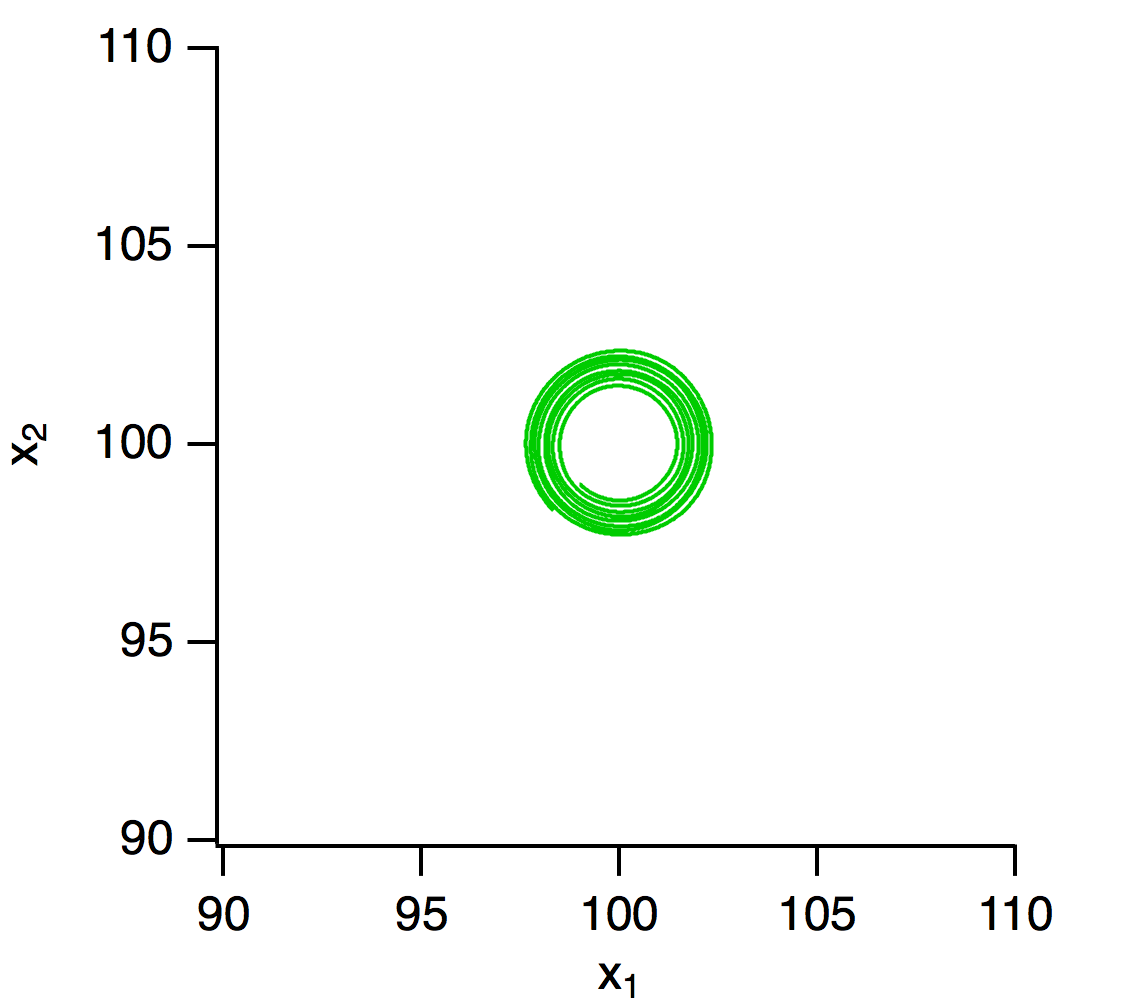
と表されます.したがって,固有値が純虚数となり,振動する解になります.




=10")
=100")
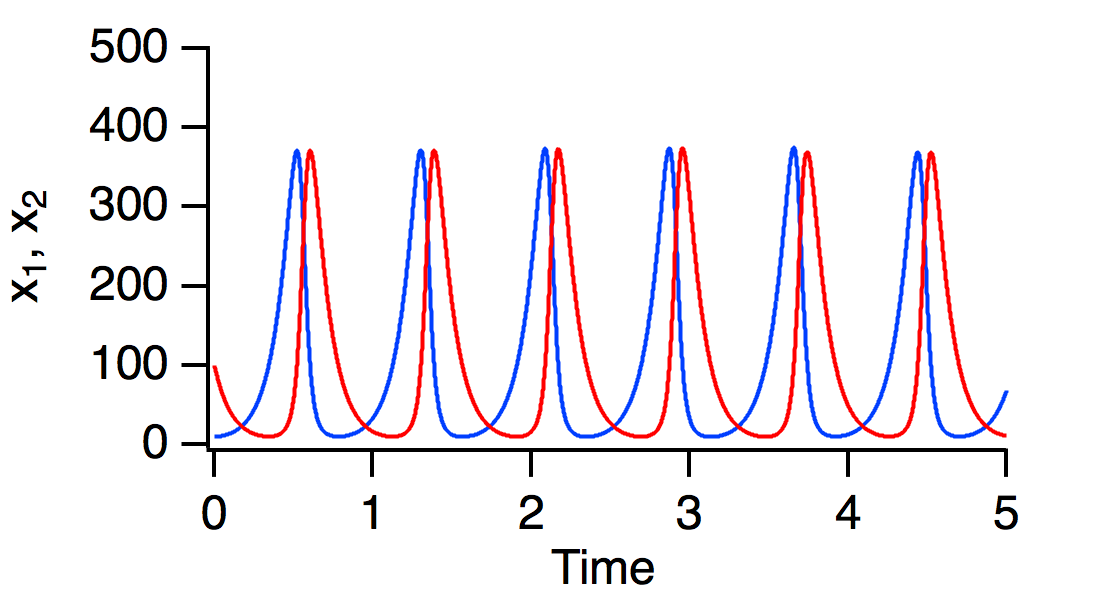
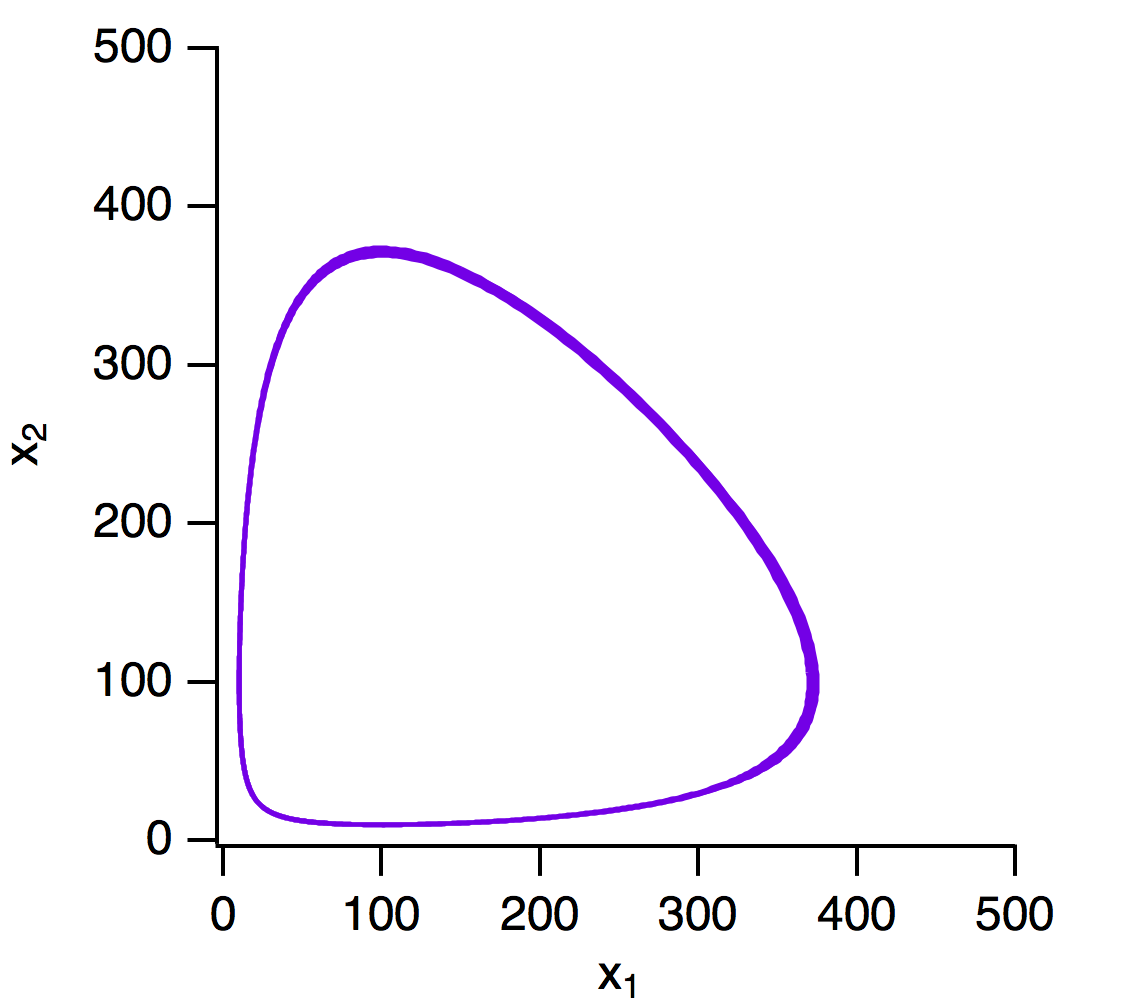
初期値を平衡点((100, 100))に近い点(99, 99)とすると下図のように円に近い軌道を描きます.
MATLABのコードです.
- lv.m
tspan = [0:0.001:5]; [t y] = ode45(@LotkaVolterra,tspan, [99 99]); figure(1); plot(t, y(:,1), 'b', t, y(:,2), 'r'); figure(2); plot(y(:,1), y(:,2));
- LotkaVolterra.m
function dx = LotkaVolterra(t, x) alpha = 10; beta = 0.1; gamma = 10; delta = 0.1; dx = zeros(2,1); dx(1) = alpha * x(1) - beta * x(1) * x(2); dx(2) = delta * x(1) * x(2) - gamma * x(2); end