木星を観測しやすい季節になりました.また,月末には火星が接近します.口径80 mmの屈折式望遠鏡にカメラを取り付けてリレーレンズ方式で撮影しました.


木星を観測しやすい季節になりました.また,月末には火星が接近します.口径80 mmの屈折式望遠鏡にカメラを取り付けてリレーレンズ方式で撮影しました.
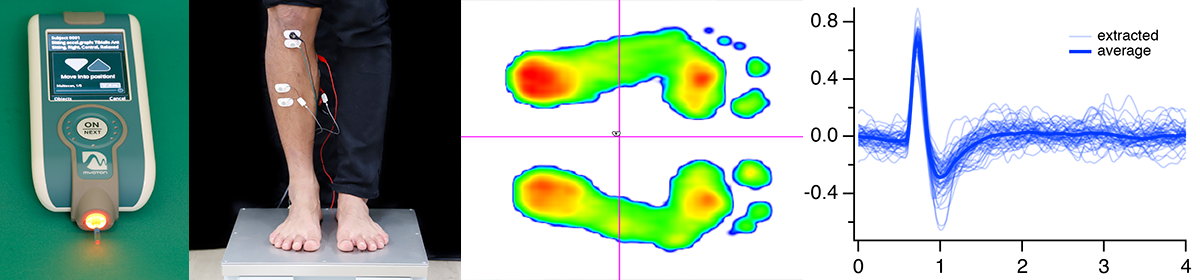
バイオメカニズム学会誌の特集「柔軟物の硬さ」を担当しました.Vol. 40, No. 2として5月1日に発行されました.特集では,
を寄稿しました.押し込み型の硬度計の計測原理と,ウレタンフォームなど様々な柔軟物を市販の硬度計で計測したときの指示値間の関係について解説しました.用いた硬度計は,アスカーゴム硬度計E型(高分子計器株式会社),PEK-1(株式会社井元製作所),TDM-Z1(有限会社トライオール),FGRT-5(日本電算シンポ株式会社),TK-03C(株式会社特殊計測)の5機種です.




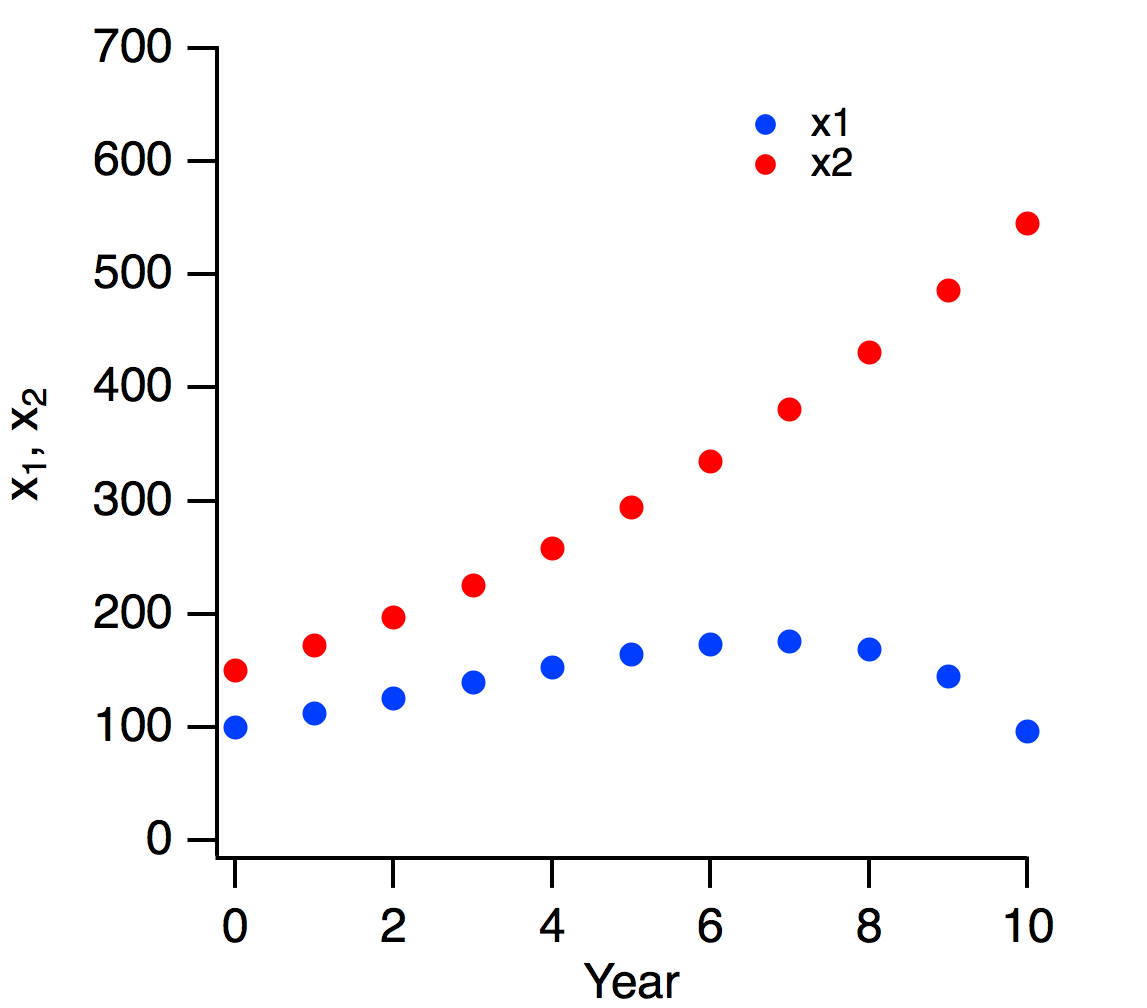
物理情報数学Bで,行列の累乗の応用例として,餌と捕食者の関係を表す行列差分方程式を説明しています.
「第
")
")
")
")
")
")
上記の関係を行列差分方程式で表すと
![\left[\begin{array}{c}x_1(k+1) \\x_2(k+2)\end{array}\right] = \left[\begin{array}{rr}\alpha & -\beta \\ \delta & \gamma\end{array}\right] \left[\begin{array}{c}x_1(k) \\x_2(k)\end{array}\right]](https://s0.wp.com/latex.php?latex=+++%5Cleft%5B%5Cbegin%7Barray%7D%7Bc%7Dx_1%28k%2B1%29+%5C%5Cx_2%28k%2B2%29%5Cend%7Barray%7D%5Cright%5D+++%3D+++%5Cleft%5B%5Cbegin%7Barray%7D%7Brr%7D%5Calpha+%26+-%5Cbeta+%5C%5C+%5Cdelta+%26+%5Cgamma%5Cend%7Barray%7D%5Cright%5D+++%5Cleft%5B%5Cbegin%7Barray%7D%7Bc%7Dx_1%28k%29+%5C%5Cx_2%28k%29%5Cend%7Barray%7D%5Cright%5D+++&bg=ffffff&fg=000000&s=0 "\left[\begin{array}{c}x_1(k+1) \\x_2(k+2)\end{array}\right] = \left[\begin{array}{rr}\alpha & -\beta \\ \delta & \gamma\end{array}\right] \left[\begin{array}{c}x_1(k) \\x_2(k)\end{array}\right]")
になります.一般解は
![\boldsymbol{x}(k) = \left[\begin{array}{rr}\alpha & -\beta \\ \delta & \gamma\end{array}\right]^k\boldsymbol{x}(0)](https://s0.wp.com/latex.php?latex=%5Cboldsymbol%7Bx%7D%28k%29+%3D+%5Cleft%5B%5Cbegin%7Barray%7D%7Brr%7D%5Calpha+%26+-%5Cbeta+%5C%5C+%5Cdelta+%26+%5Cgamma%5Cend%7Barray%7D%5Cright%5D%5Ek%5Cboldsymbol%7Bx%7D%280%29&bg=ffffff&fg=000000&s=0 "\boldsymbol{x}(k) = \left[\begin{array}{rr}\alpha & -\beta \\ \delta & \gamma\end{array}\right]^k\boldsymbol{x}(0)")
になります.
この行列差分方程式を講義では手計算で解けるように,



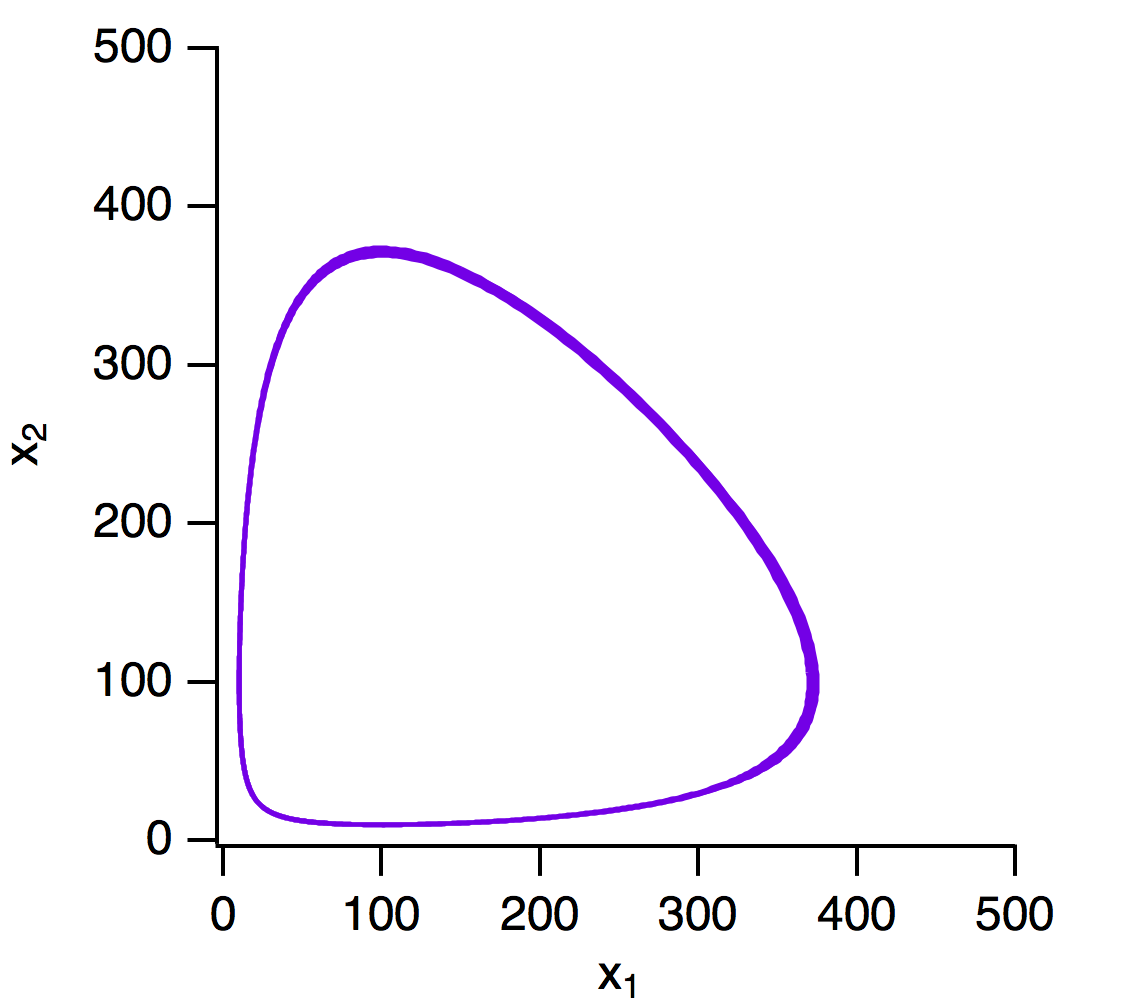
餌と捕食者の関係のモデルとしては,ロトカ・ボルテラのモデルが知られています.このモデルでは,
}{dt} = \alpha x_1(t) - \beta x_1(t)x_2(t) \\ \displaystyle\frac{dx_2(t)}{dt} = \delta x_1(t)x_2(t) - \gamma x_2(t)")
で表されます.非線形微分方程式ですから,")
")
また,平衡点は/dt=0")
/dt=0")


x_2(t)")
")
![\displaystyle\frac{d}{dt}\left[\begin{array}{c}x_1(t) \\x_2(t)\end{array}\right] = \left[\begin{array}{rr}\alpha & 0 \\ 0 & -\gamma\end{array}\right] \left[\begin{array}{c}x_1(t) \\x_2(t)\end{array}\right]](https://s0.wp.com/latex.php?latex=+++%5Cdisplaystyle%5Cfrac%7Bd%7D%7Bdt%7D%5Cleft%5B%5Cbegin%7Barray%7D%7Bc%7Dx_1%28t%29+%5C%5Cx_2%28t%29%5Cend%7Barray%7D%5Cright%5D+++%3D+++%5Cleft%5B%5Cbegin%7Barray%7D%7Brr%7D%5Calpha+%26+0+%5C%5C+++0+%26+-%5Cgamma%5Cend%7Barray%7D%5Cright%5D+++%5Cleft%5B%5Cbegin%7Barray%7D%7Bc%7Dx_1%28t%29+%5C%5Cx_2%28t%29%5Cend%7Barray%7D%5Cright%5D+++&bg=ffffff&fg=000000&s=0 "\displaystyle\frac{d}{dt}\left[\begin{array}{c}x_1(t) \\x_2(t)\end{array}\right] = \left[\begin{array}{rr}\alpha & 0 \\ 0 & -\gamma\end{array}\right] \left[\begin{array}{c}x_1(t) \\x_2(t)\end{array}\right]")
となり,行列の固有値は実数で1つは正でもう1つは負です.したがって,
また,もう1つの平衡点")


![\displaystyle\frac{d}{dt}\left[\begin{array}{c}x_1(t) \\x_2(t)\end{array}\right] = \left[\begin{array}{rr}0 & -\frac{\beta\gamma}{\delta} \\ \frac{\alpha\delta}{\beta} & 0\end{array}\right] \left[\begin{array}{c}x_1(t) \\x_2(t)\end{array}\right]](https://s0.wp.com/latex.php?latex=+++%5Cdisplaystyle%5Cfrac%7Bd%7D%7Bdt%7D%5Cleft%5B%5Cbegin%7Barray%7D%7Bc%7Dx_1%28t%29+%5C%5Cx_2%28t%29%5Cend%7Barray%7D%5Cright%5D+++%3D+++%5Cleft%5B%5Cbegin%7Barray%7D%7Brr%7D0+%26+-%5Cfrac%7B%5Cbeta%5Cgamma%7D%7B%5Cdelta%7D+%5C%5C+++%5Cfrac%7B%5Calpha%5Cdelta%7D%7B%5Cbeta%7D+%26+0%5Cend%7Barray%7D%5Cright%5D+++%5Cleft%5B%5Cbegin%7Barray%7D%7Bc%7Dx_1%28t%29+%5C%5Cx_2%28t%29%5Cend%7Barray%7D%5Cright%5D+++&bg=ffffff&fg=000000&s=0 "\displaystyle\frac{d}{dt}\left[\begin{array}{c}x_1(t) \\x_2(t)\end{array}\right] = \left[\begin{array}{rr}0 & -\frac{\beta\gamma}{\delta} \\ \frac{\alpha\delta}{\beta} & 0\end{array}\right] \left[\begin{array}{c}x_1(t) \\x_2(t)\end{array}\right]")
と表されます.したがって,固有値が純虚数となり,振動する解になります.




=10")
=100")
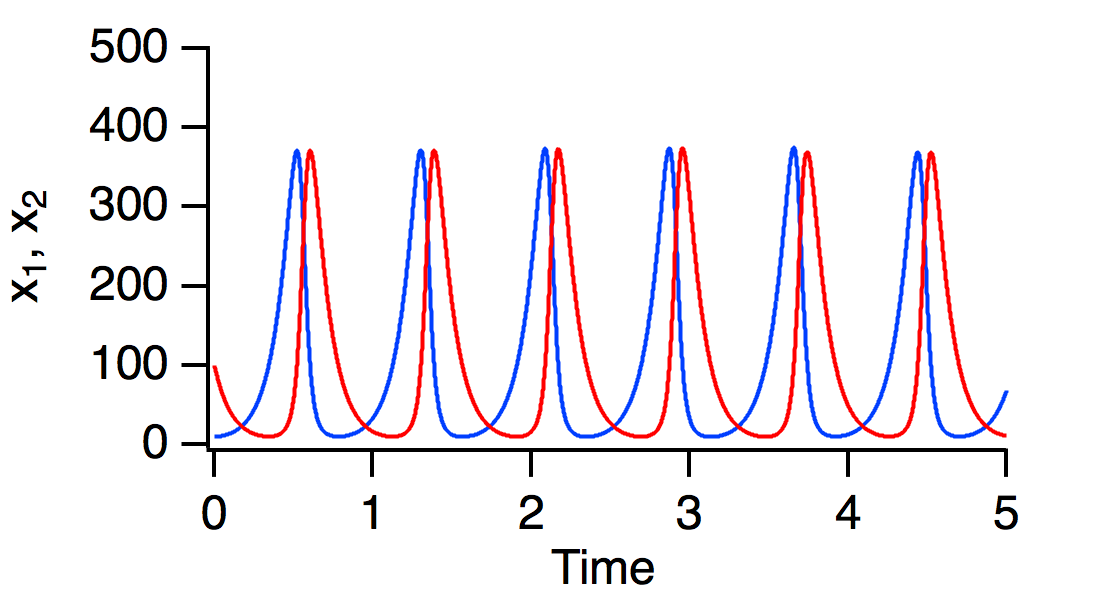
初期値を平衡点((100, 100))に近い点(99, 99)とすると下図のように円に近い軌道を描きます.
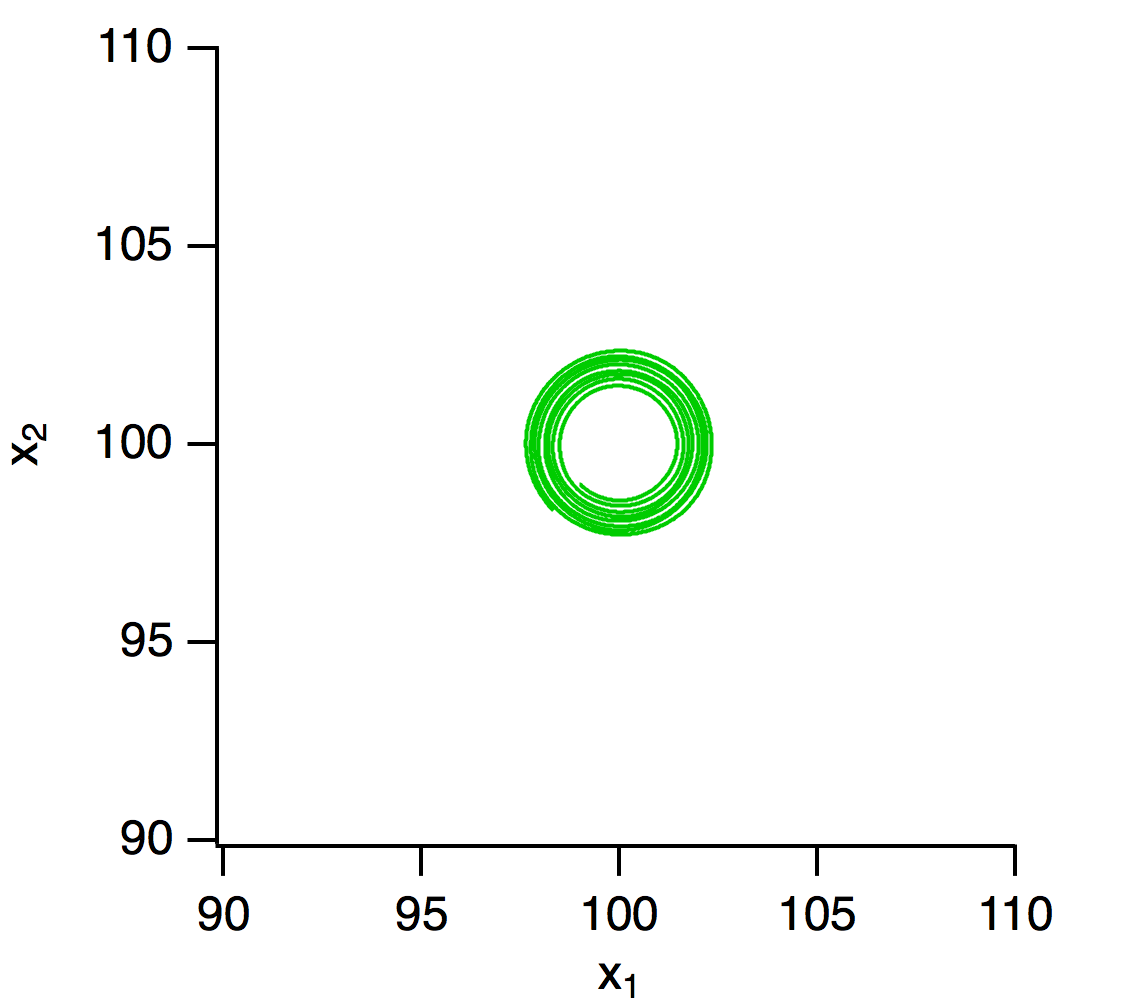
MATLABのコードです.
tspan = [0:0.001:5]; [t y] = ode45(@LotkaVolterra,tspan, [99 99]); figure(1); plot(t, y(:,1), 'b', t, y(:,2), 'r'); figure(2); plot(y(:,1), y(:,2));
function dx = LotkaVolterra(t, x) alpha = 10; beta = 0.1; gamma = 10; delta = 0.1; dx = zeros(2,1); dx(1) = alpha * x(1) - beta * x(1) * x(2); dx(2) = delta * x(1) * x(2) - gamma * x(2); end